Беспилотный гусеничный транспортер для подземных выработок

Системные функции
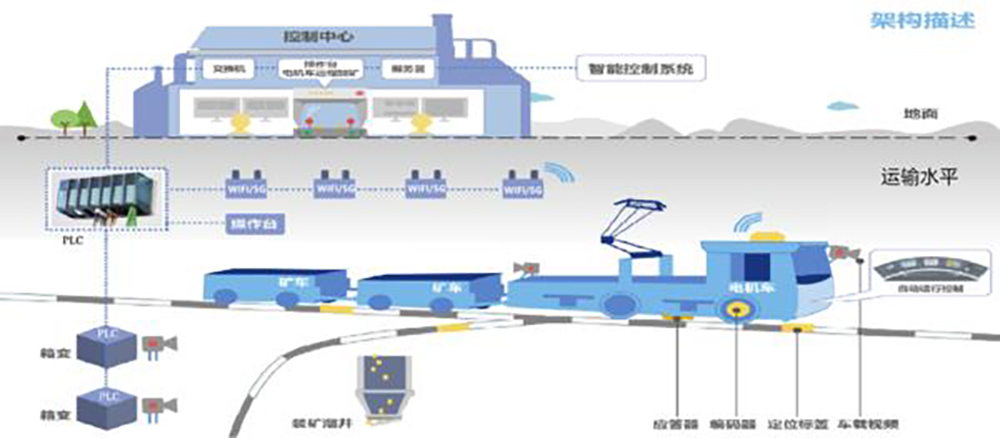
Система беспилотного электровоза состоит из системы управления автоматической работой (ATO), блока управления PLC, блока точного позиционирования, интеллектуального блока дозирования, блока беспроводной связи, блока управления централизованным закрыванием сигнала переключения, видеомониторинга и видео AI. система и центр управления.
Краткое описание функции
Полностью автоматический крейсерский режим:в соответствии с теорией крейсерского движения с фиксированной скоростью, в соответствии с реальной ситуацией и требованиями в каждой точке транспортного уровня, модель крейсерского движения транспортного средства строится для реализации автономной регулировки скорости движения локомотива.
Система точного позиционирования:точное позиционирование локомотива достигается с помощью технологии связи и технологии распознавания маяков и т. д. с автоматическим подъемом носовой части и автономной регулировкой скорости.
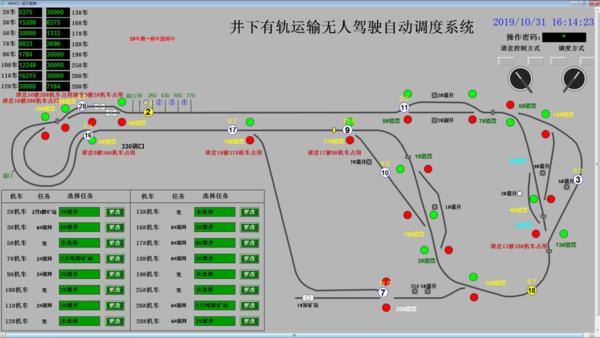
Интеллектуальная диспетчеризация:Благодаря сбору данных, таких как уровень материала и качество каждого желоба, а затем в соответствии с положением в реальном времени и рабочим статусом каждого локомотива, локомотив автоматически назначается для работы.
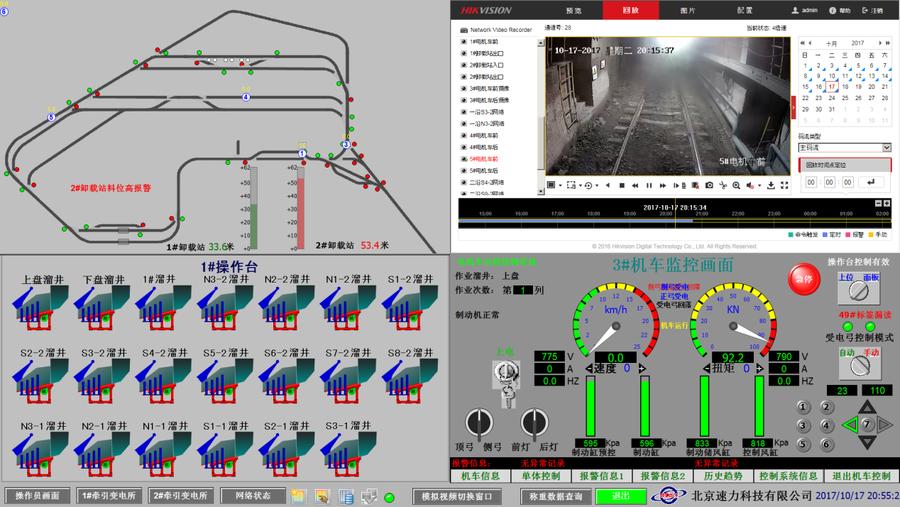
Удаленная ручная загрузка:Удаленная ручная погрузка может осуществляться на поверхности путем управления погрузочным оборудованием.(Дополнительная полностью автоматическая система загрузки)
Обнаружение препятствий и защита безопасности:Добавляя высокоточное радиолокационное устройство перед транспортным средством для обнаружения людей, транспортных средств и падающих камней перед транспортным средством, чтобы обеспечить безопасное расстояние до транспортного средства, транспортное средство автономно выполняет ряд операций, таких как зондирование звуковой сигнал и торможение.
Функция статистики производства:Система автоматически выполняет статистический анализ параметров движения локомотива, траекторий движения, журналов команд и завершения производства для формирования отчетов о ходе производства.
Основные моменты системы.
Автоматическая работа систем метрополитена.
Пионер нового режима работы беспилотного подземного локомотива.
Реализация сетевого, цифрового и визуального управления системами метрополитена.

Анализ эффективности системы
Автоматическое подземное производство, оптимизирующее схемы производства.
Оптимизация количества работающих и снижение затрат на оплату труда.
Улучшение рабочей среды и повышение искробезопасности.
Интеллектуальные операционные механизмы для управления изменениями.
Экономическая выгода.
-Эффективность:повышение производительности с помощью одного локомотива.
Стабильное производство благодаря интеллектуальному распределению руды.
-Персонал:машинист локомотива и машинист шахты в одном лице.
Один рабочий может управлять несколькими локомотивами.
Сокращение численности личного состава на позициях в пункте разгрузки шахты.
-Оборудование:снижение стоимости вмешательства человека в оборудование.
Преимущества управления.
Анализ данных об оборудовании для обеспечения предварительного обслуживания оборудования и снижения затрат на управление оборудованием.
Улучшайте производственные модели, оптимизируйте укомплектование персоналом и сокращайте расходы на управление персоналом.





